移远通信-全球物联网整体解决方案供应商
- 产品与服务
- 行业应用
- 技术支持
- 开发者
- 关于移远
- 新闻资讯
- 联系我们
本项目基于移远 模组实现舵机驱动功能,是面向物联网创客的入门级实操案例,核心及技术细节已托管至 GitHub,可直接获取调试。
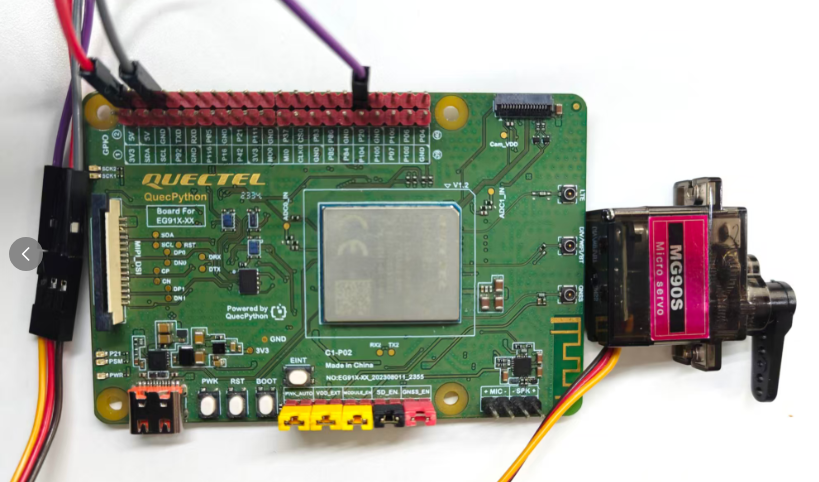
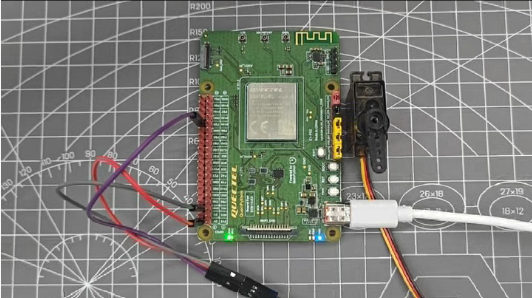
基于 EG915UEUAB 模组完成硬件适配与程序烧录后,可实现开发板驱动舵机,支持基础的控制占空比和旋转角度等核心操作,在低功耗、小体积的物联网硬件环境下实现,无需复杂的外围设备,极简硬件搭配即可完成功能落地。
| 组件 | 实物 | 数量 | 获取方式 |
| C1-P02 开发板(搭载 EG915U 模组) | 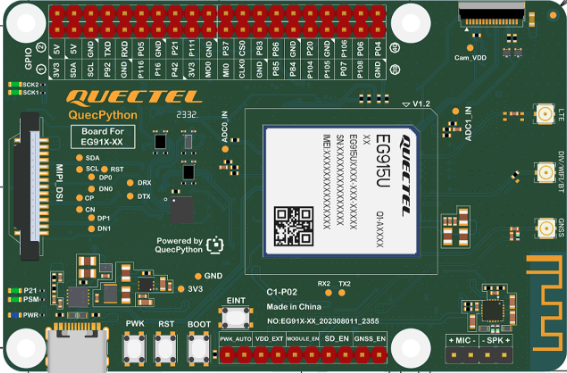 |
1 | 商品详情 |
 |
1 | 其他 | |
| Type-C数据线 |  |
1 | 其他 |
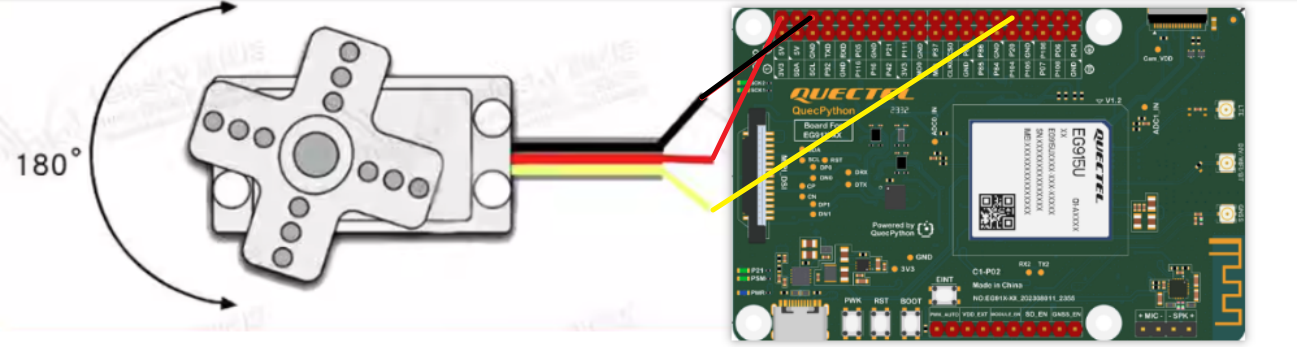
舵机的输入线共有三条,如图所示,红色中间,是电源正线,一根棕色(有些是黑色)是电源地线,这两根线给舵机提供最基本的能源保证,主要是电机的转动消耗。另外一根线是控制信号线,一般为桔黄色。按照以下表格一一对应连接。
| 硬件 | 开发板 |
| USB | 开发板USB接口 |
| 地线(SG90) | GND |
| 电源线(SG90) | VCC(5V) |
| 控制信号线(SG90) | PWM0(P20) |
| 需求 | 作用 | 获取途径 |
| USB驱动 | 电脑识别设备端口 | 资源下载 | QuecDevZone |
| VScode | 编写代码 | VSCode |
| QPYCom | 烧录工具 | QPYcom |
| 固件包 | 功能模块资源 | 资源下载 | QuecDevZone |
Quectel USB 字样的 COM 口,表示开机成功 
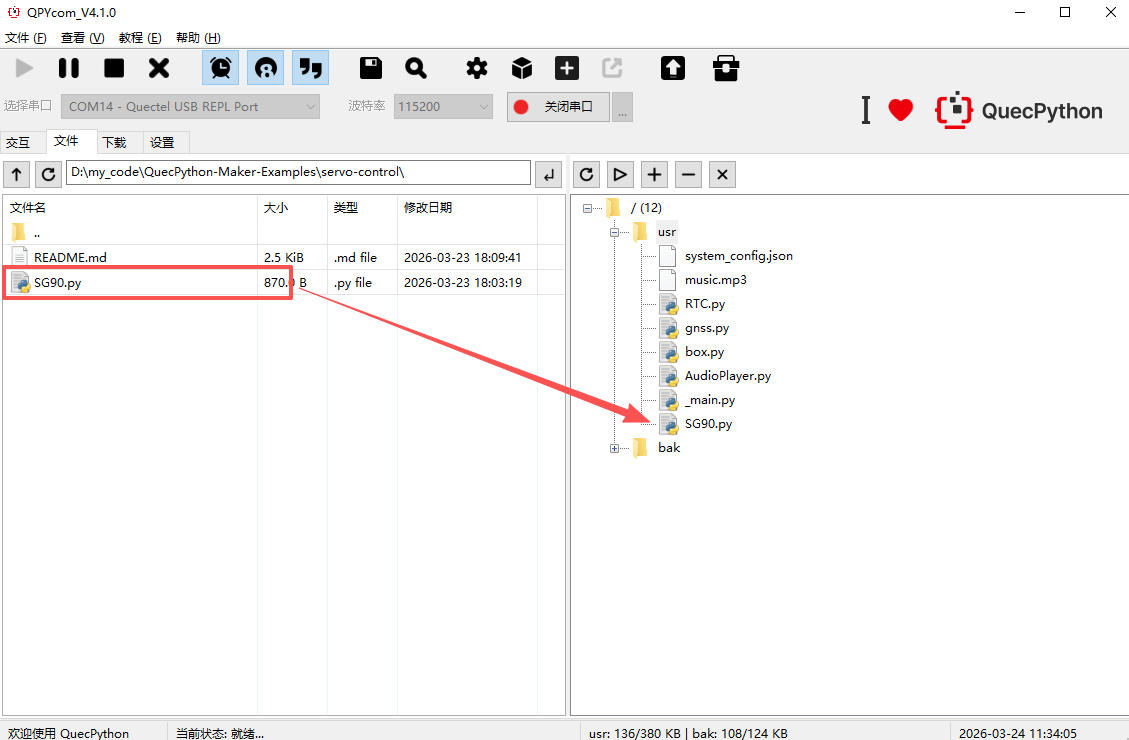
参考此章节,执行主程序文件 SG90.py。
参考此章节,停止程序运行。

初始化PWM:pwm= PWM_V2(PWM_V2.PWM0, 100.0, start)调整占空比:pwmx.open(100.0,data)平滑转动:
def smooth_move(pwmx,start0,end,steps=5): for i in range(steps+1): pwmx.open(100.0,start0+int((end-start0)/(steps)*i)) utime.sleep_ms(20)
1.轻量易上手:依托 C1-P02 开发板(搭载 EG915U 模组)的物联网开发特性,简化舵机驱动的硬件与程序设计,创客入门级难度,无需深厚的嵌入式开发基础。
2.物联模组跨界应用:突破 C1-PO2 开发板传统的物联网通信应用场景,实现 “通信模组 + 舵机精准控制” 的跨界实操,玩法新颖。
3.硬件极简:无需额外搭载专业舵机控制板,基于模组本身的 PWM_V2 驱动及少量外围配件(如 舵机、杜邦线)即可实现舵机平滑运动,降低硬件搭建成本与复杂度。
4.可扩展性强:基础舵机驱动功能可快速拓展至物联网远程控舵、定时角度调节、短信 / 指令联动舵机动作等进阶玩法,适配创客开发需求。
仓库内还有更多优质创客案例,欢迎前往 GitHub 获取完整代码。如果喜欢本项目,不妨顺手点个 Star 支持一下~
点击直达仓库:QuecPython-Maker-Examples



