移远通信-全球物联网整体解决方案供应商
- 产品与服务
- 行业应用
- 技术支持
- 开发者
- 关于移远
- 新闻资讯
- 联系我们

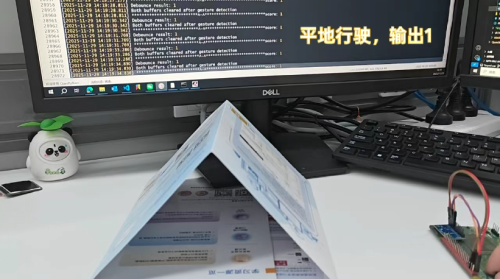
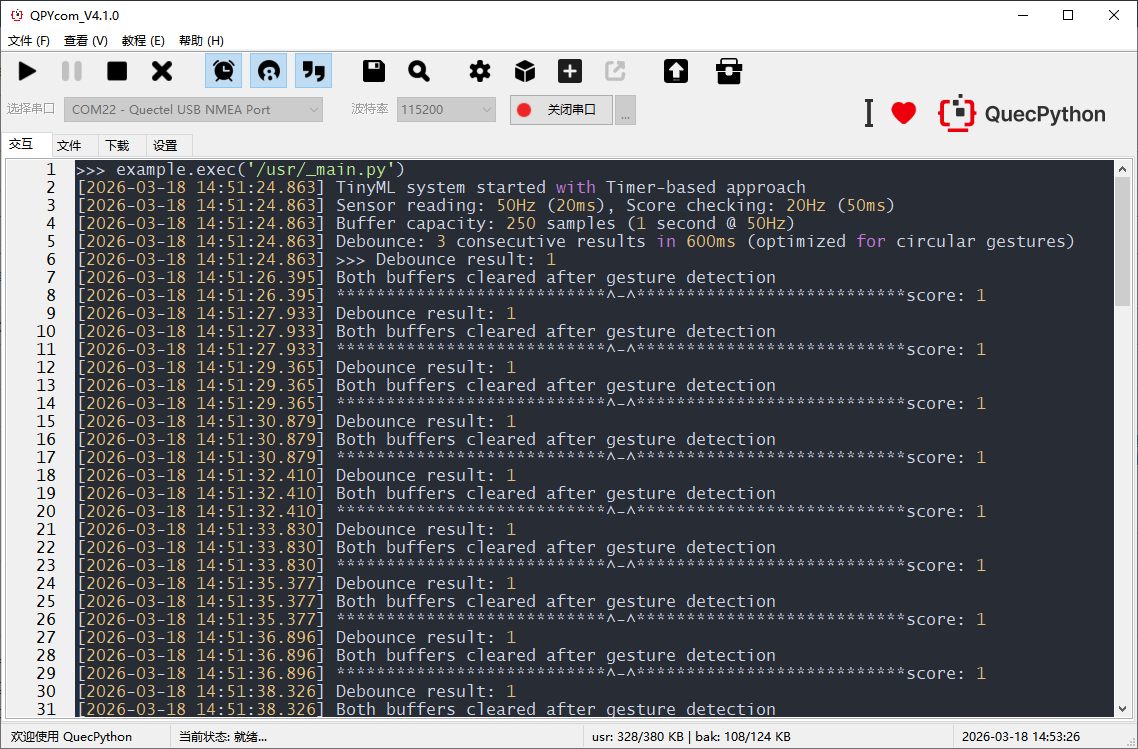
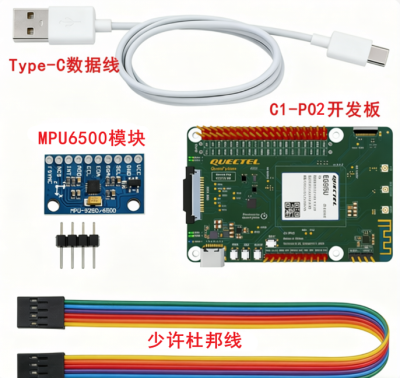
本案例是一个基于C1-P02开发板+TinyML的应用案例。核心算法采用随机森林算法,稳定判断 4 种清晰的汽车模拟行驶状态。实现原理:将MPU6500采集的数据传入预先训练好的模型,模型输出每个行驶状态可能的概率,通过概率判断行驶状态。
分类器基于传感器采集的数据特征,能够准确区分以下四种场景:
| 状态代码 | 状态名称 | 识别特征说明 |
|---|---|---|
| 0 | 平地行驶 | 车辆在水平路面匀速或变速行驶,各项运动参数保持稳定。 |
| 1 | 上坡 | 车辆沿倾斜路面向上行驶,Z 轴方向加速度出现特征性变化。 |
| 2 | 下坡 | 车辆沿倾斜路面向下行驶,加速度与角速度呈现与上坡不同的规律。 |
| 3 | 侧滑 | 车辆发生横向滑动,X 轴或 Y 轴方向出现异常加速度波动。 |
软件可在QuecPython板块下载专区获取,严禁混用型号。
| 名称 | 作用 | 注意事项 |
| QuecPython 驱动 | 建立电脑与板子的通信桥梁 | 型号必须严格匹配搭载的模组型号。 |
| QuecPython 固件 | 开发板运行代码的环境 | 尾缀必须一致。例如模组型号含 `CNLE`,固件也必须选 `...CNLE` 版本。 |
| QPYcom 工具 | 代码烧录与调试终端 | 官方集成开发环境,无需额外配置。 |
| MPU6500 | C1-P02 | 说明 |
|---|---|---|
| VCC | 3V3 | 电源 |
| GND | GND | 接地 |
| SCL | SCL (I2C1) | 时钟 |
| SDA | SDA (I2C1) | 数据 |