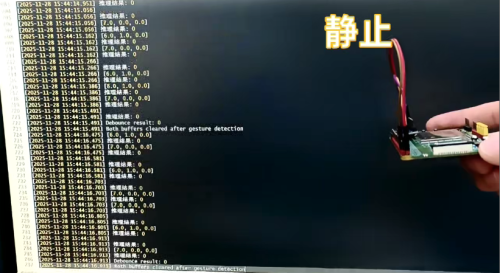
效果展示
项目亮点
在物联网场景里,“跌倒检测”是个老生常谈但很难做好的功能。
- 传统做法:写一堆 if-else 判断加速度阈值。结果就是:稍微蹲快点就误报,真摔了反而没反应。
- 本方案:引入 TinyML(微型机器学习)。
- 我们训练了一个随机森林模型,让它去“理解”什么是走路、什么是静止、什么是摔倒。
- 核心优势:它不是死板的阈值,而是基于数据特征的判断,准确率吊打传统逻辑。
- 极致轻量:整个推理过程在 QuecPython 环境下运行,内存占用极低,普通模组也能跑得飞起。
项目拆解:它是怎么工作的?
别被“AI”吓到,原理其实很简单:
- 感知层:MPU6500 六轴传感器疯狂采集数据(加速度 + 陀螺仪),每秒上百次。
- 大脑层:数据喂给预训练好的随机森林分类器。
- 0 = 静止(Static)
- 1 = 闲庭信步 (Walking)
- 2 = 危险!摔倒啦! (Falling)
- 防抖机制(关键!):
- 为了防止手抖或传感器噪声导致误报,我们加了一层“三振出局”逻辑:必须连续 3 次 识别结果一致,才触发最终事件。
- 非阻塞架构:
- 很多 Demo 一跑 AI 主程序就卡死,我们这个用了硬件定时器 + 循环缓冲区。
- 意思是:它在后台默默算你的跌倒检测,前台该联网联网,该亮灯亮灯,互不干扰。
快速上手指南 (拒绝废话版)
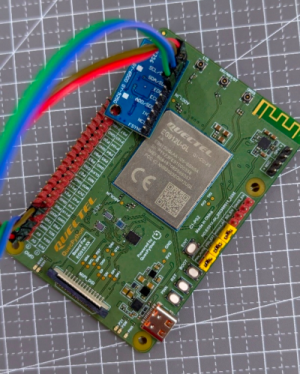
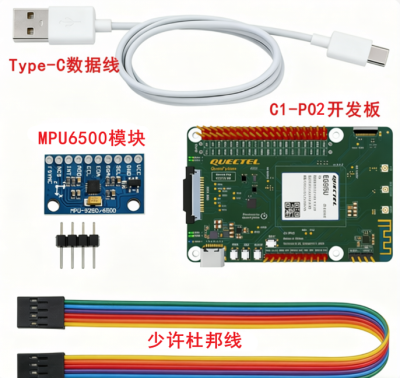
1.装备收集
部分硬件可在移远官方商城购买
- 核心板:C1-P02 开发板(确认好你的模组型号,别买错了),点此购买
- 传感器:MPU6500 模块(I2C 接口是必须的),点此购买
- 连接线:杜邦线 4 根 + 能传数据的 USB 线(再次强调:那种只能充电的线会让你怀疑人生)
软件可在官方QuecPython板块下载专区获取,严禁混用型号。
| 名称 |
作用 |
注意事项 |
| QuecPython 驱动 |
建立电脑与板子的通信桥梁 |
型号必须严格匹配搭载的模组型号。 |
| QuecPython 固件 |
开发板运行代码的环境 |
尾缀必须一致。例如模组型号含 `CNLE`,固件也必须选 `...CNLE` 版本。 |
| QPYcom 工具 |
代码烧录与调试终端 |
官方集成开发环境,无需额外配置。 |
2.接线,通电,开搞!
别接错线,接错容易冒烟:
- VCC -> 3V3
- GND -> GND
- SCL -> SCL(I2C1)
- SDA -> SDA(I2C1)
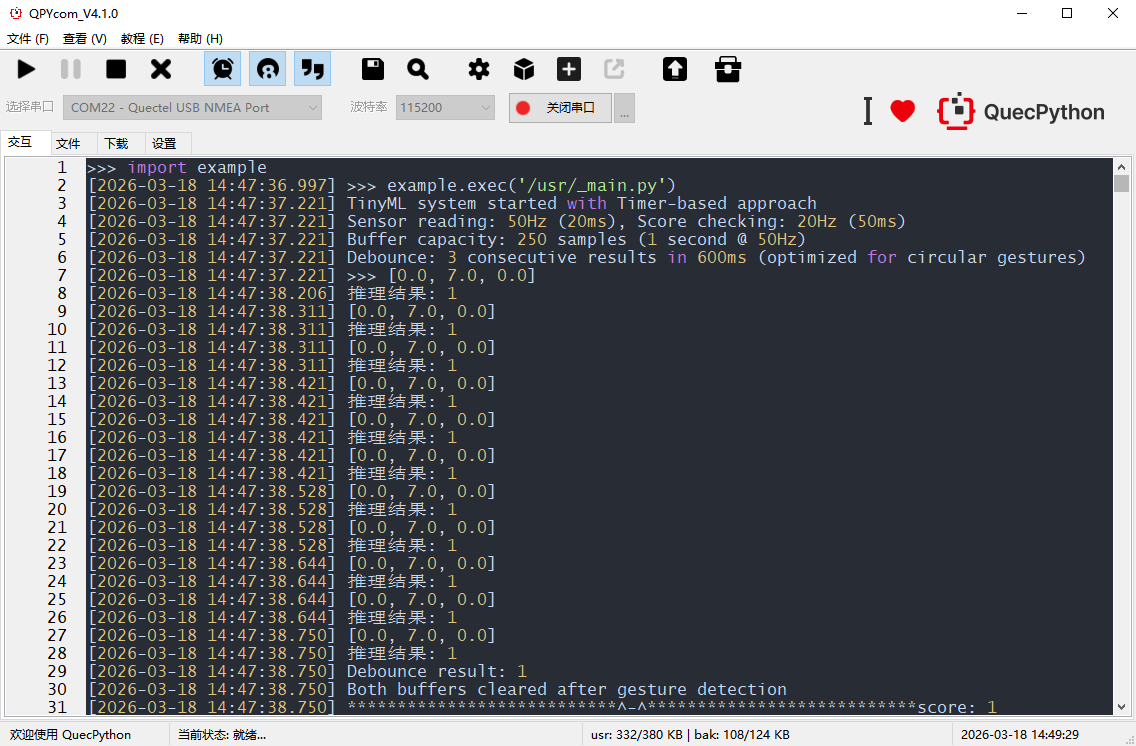
3.烧录与运行 (三步走)
- 刷固件:插上板子,QPYcom 找到REAL PORT点击下载窗口,选择 “下载固件”。看到下载完成才算完事。找不到端口?换个 USB 口,或者重装驱动。
- 传代码:把示例代码拖进开发板的usr 目录。
- Run it!:右键文件选 “运行”。
盯着QPYcom窗口,你会看到数据流疯狂刷新:
避坑小贴士 (血泪经验)
- 固件匹配是红线:千万别觉得“差不多就行”。模组型号差一个字母,固件都可能不兼容。下载前务必核对板子背面的标签。
- 数据线陷阱:90% 的“连不上设备”都是因为用了手机自带的仅充电线。换根能传数据的线,世界瞬间清净。
- 传感器方向:MPU6500 是有方向的,安装时注意坐标轴,否则你站着它可能以为你在倒立。
代码都在这了,不想从零开始?
直接去我们的 GitHub 创客仓库 克隆项目。里面不仅有这个跌倒检测,还有更多脑洞大开的 QuecPython 案例。
👉 传送门:QuecPython-Maker-Examples
如果你把这个 Demo 改成了“宠物跌倒检测”或者“震动防盗报警”,是否会更高级呢?
觉得有用?Star ⭐️ 一下仓库,这是对创作者最大的鼓励!